In-Wheel-Antriebe mit Außenläufer-Technologie
- Wolfgang A. Haggenmüller

- 8. Mai 2025
- 7 Min. Lesezeit
Die Automobilindustrie entwickelt sich rasant weiter, insbesondere im Bereich der Elektromobilität. Eine der innovativsten Entwicklungen sind In-Wheel-Antriebe, bei denen Elektromotoren direkt in den Rädern eines Fahrzeugs verbaut werden. Diese Technologie bietet zahlreiche Vorteile gegenüber herkömmlichen zentralisierten Antriebssystemen, indem sie mechanische Komponenten wie Antriebswellen, Differentiale und Getriebe überflüssig macht. Eine besondere Variante davon ist der Außenläufermotor, der sich durch seinen speziellen Aufbau und seine technischen Besonderheiten auszeichnet. Im Folgenden wird der Aufbau, die Funktionsweise sowie die Vor- und Nachteile dieser Technologie im Detail erläutert, ergänzt um technische Aspekte wie magnetische Feldverläufe, Kühlungsstrategien, Materialwahl und praktische Anwendungen im Automobilbau.

In-Wheel-Antriebe
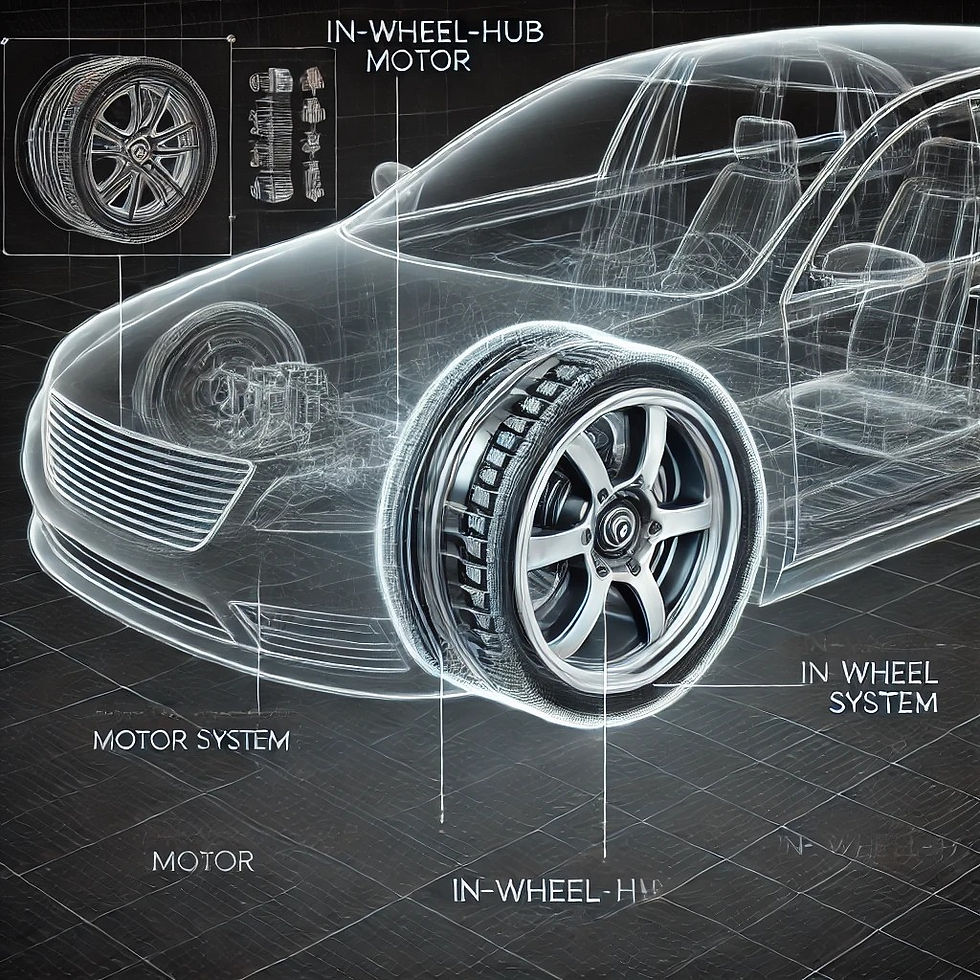
Ein In-Wheel-Antrieb, auch Radnabenmotor genannt, ist ein Elektromotor, der direkt im Rad eines Fahrzeugs integriert ist. Im Gegensatz zu konventionellen Antrieben, bei denen die Kraft über eine zentrale Antriebseinheit und eine Kardanwelle oder ein Getriebe an die Räder übertragen wird, treiben In-Wheel-Motoren jedes Rad individuell an. Dies eliminiert zahlreiche mechanische Komponenten wie Differenziale, Getriebe und Antriebswellen, wodurch Platz und Gewicht eingespart werden können
Aufbau und Funktionsweise von In-Wheel-Antrieben mit Außenläufer-Technologie
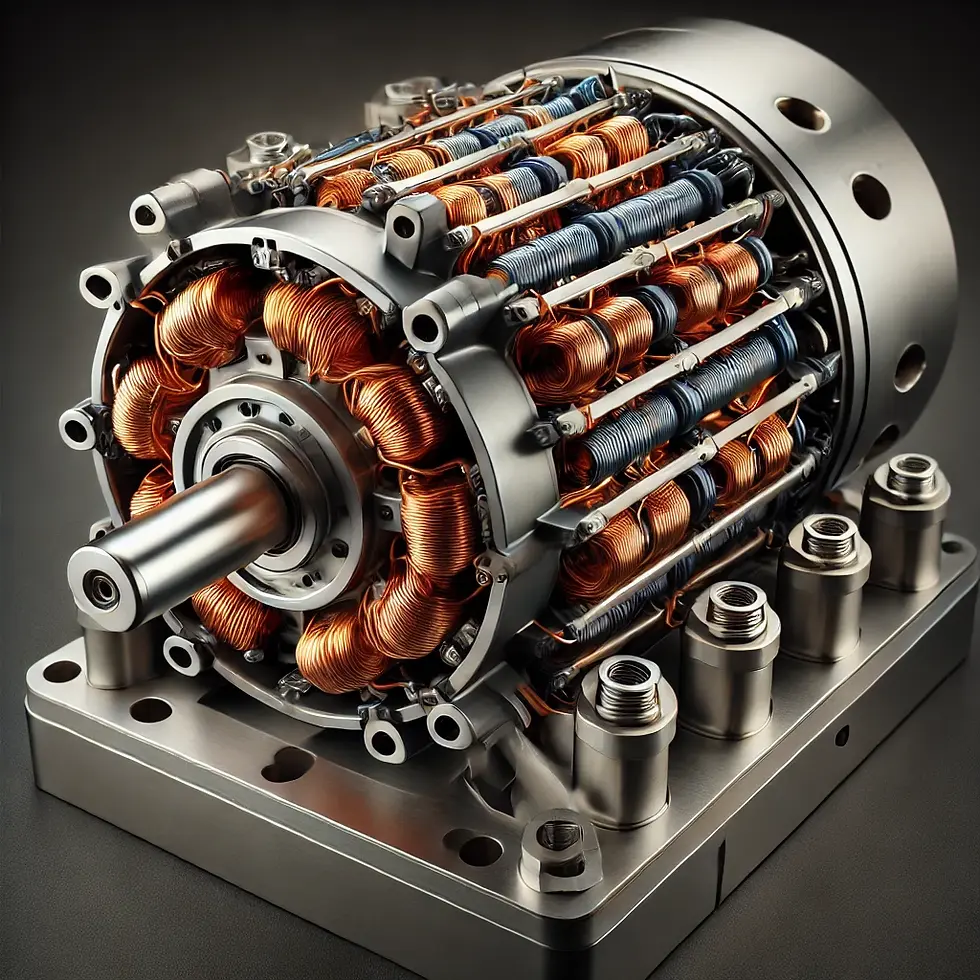
Die Grundidee eines In-Wheel-Antriebs besteht darin, den Motor direkt in die Radnabe zu integrieren, sodass jedes Rad unabhängig angetrieben werden kann. Bei der Außenläufer-Konfiguration sitzt der Rotor außen am Stator. Während klassische Innenläufermotoren den Rotor innerhalb eines feststehenden Stators platzieren, ermöglicht der Außenläuferansatz eine größere Radialdimension des Rotors. Dies führt zu einer erhöhten Schwungmasse, wodurch bei geringeren Drehzahlen mehr Drehmoment erzeugt wird. Die Verteilung des magnetischen Flusses wird durch den größeren Luftspalt und die spezifische Geometrie der Statorwicklungen optimiert. Das rotierende Magnetfeld im Stator induziert in dem außen angebrachten Rotor ein gleichmäßiges Drehmoment, welches für eine präzise Kraftübertragung auf die Radoberfläche sorgt. Durch die direkte Ansteuerung jedes Rades können moderne Regelalgorithmen, wie etwa das Torque-Vectoring, implementiert werden, was die Fahrstabilität und die Kurvenperformance erheblich verbessert.
Ein weiterer zentraler technischer Aspekt ist die Kühlung der In-Wheel-Antriebe. Aufgrund der kompakten Bauweise und der Integration in das Rad entstehen spezielle thermische Herausforderungen. Der Außenläufermotor bietet zwar durch seine größere Oberfläche eine gute Möglichkeit zur passiven Wärmeabfuhr, doch bei hohen Leistungen und Dauerbetrieb ist eine aktive Kühlung oft unabdingbar. Moderne Systeme setzen hier auf Flüssigkeits- oder erzwungene Luftkühlung, um die Temperatur im optimalen Bereich zu halten und so die Effizienz und Lebensdauer des Motors zu sichern. Die Entwicklung hocheffizienter Kühlkreisläufe ist ein wesentlicher Bestandteil der fortschrittlichen In-Wheel-Technologie.
Auch die Materialwahl spielt eine entscheidende Rolle bei der Optimierung von In-Wheel-Antrieben. Der Einsatz von Leichtbaumaterialien wie Aluminium, Hochleistungs-Kunststoffen oder Verbundwerkstoffen ermöglicht nicht nur eine Reduktion der ungefederten Masse, sondern trägt auch zur verbesserten thermischen Stabilität bei. Im Stator kommen häufig hochwertige magnetisierbare Materialien wie Siliziumstahl zum Einsatz, während im Rotor – insbesondere bei Varianten mit Permanentmagneten – auch seltene Erden in Form von Neodym-Eisen-Bor-Magneten genutzt werden können. Einige Designs verzichten allerdings bewusst auf teure Magnete und setzen auf eine rein reluktanzbasierte Ausführung, um Kosten zu sparen und den ökologischen Fußabdruck zu verringern.
Die Vorteile der In-Wheel-Antriebe mit Außenläufer-Technologie liegen auf der Hand: Durch den Wegfall vieler mechanischer Übertragungselemente wird das System leichter, kompakter und potenziell effizienter, da Energieverluste minimiert werden. Die direkte Ansteuerung jedes Rades bietet darüber hinaus ein hohes Maß an Flexibilität und Kontrolle, was insbesondere in dynamischen Fahrsituationen zu einer verbesserten Traktion und Stabilität führt. Fahrzeuge können dadurch nicht nur schneller beschleunigen, sondern auch präziser in Kurven agieren, da das Drehmoment individuell verteilt werden kann.
Dennoch gibt es auch Herausforderungen, die es zu berücksichtigen gilt. Ein wesentlicher Nachteil ist die erhöhte ungefederten Masse, da die Motoren direkt in den Rädern verbaut sind. Dies kann das Fahrverhalten, insbesondere den Fahrkomfort und die Federungsdynamik, beeinträchtigen. Zudem erfordert die präzise elektronische Steuerung der einzelnen Radmotoren aufwendige Regelalgorithmen und eine robuste Hardware, was zu höheren Entwicklungs- und Produktionskosten führt. Die Integration in bestehende Fahrwerks- und Bremssysteme stellt weitere technische Herausforderungen dar, die durch innovative Konstruktionen und Simulationstechniken bewältigt werden müssen.
Praktische Anwendungen der In-Wheel-Antriebe mit Außenläufer-Technologie finden sich heute vor allem in Konzeptfahrzeugen und Testmodellen im Bereich der urbanen Mobilität. Unternehmen wie Protean Electric und Elaphe haben Prototypen entwickelt, die sich durch hohe Wendigkeit und Effizienz auszeichnen. Insbesondere leichte, wendige Elektroautos und Stadtbusse profitieren von der dezentralen Antriebstechnologie, da sie den Anforderungen an Raumoptimierung und individuelle Radsteuerung gerecht wird. Einige Hersteller nutzen diese Technologie auch in elektrischen Nutzfahrzeugen, um eine bessere Traktion bei variierenden Lastbedingungen zu gewährleisten. Die Möglichkeit, durch Torque-Vectoring das Antriebskonzept an unterschiedliche Fahrbahnbedingungen anzupassen, macht den In-Wheel-Antrieb besonders attraktiv für den Einsatz in Fahrzeugen, die in urbanen Umgebungen agieren, wo häufige Stop-and-Go-Situationen und enge Kurvenverläufe üblich sind.
Die In-Wheel-Hubs werden auch weiterhin nur einen Sonderantrieb in Automobilanwendungen darstellen, die über Kleinstserien kaum hinaus gehen. Derzeit sind lediglich Fahrzeuge von Dongfeng mit dem Einsatz von Radnabenmotoren und das Kleinserien High Performance Fahrzeug Renault R5 Turbo 3E bekannt. . Es sind derzeit keinen weiteren OEM bekannt, die Pläne für die Anwendung von Radnabenmotoren angekündigt haben. Die Autos Dongfeng (E70 und Passion) mit einer Kombination aus E-Achse und zwei Radnabenmotoren sind bis jetzt noch nicht für den offenen Markt verfügbar, sondern nur für den Taxi- und Ride-Hailing-Markt in bestimmten Bezirken im Einsatz.
Zusammenfassend lässt sich feststellen, dass In-Wheel-Antriebe mit Außenläufer-Technologie ein vielversprechender Ansatz im modernen Automobilbau sind. Ihre innovative Bauweise ermöglicht eine direkte Kraftübertragung, eine optimierte Regelung der Traktion und eine flexible Integration in verschiedene Fahrzeugtypen. Trotz technischer Herausforderungen wie der erhöhten ungefederten Masse und komplexen Kühlungsanforderungen bieten sie signifikante Vorteile in Bezug auf Effizienz, Fahrdynamik und Raumoptimierung. Mit fortschreitender Forschung und Entwicklung könnten diese Systeme künftig in einer breiteren Palette von Fahrzeugen Anwendung finden und einen entscheidenden Beitrag zur Weiterentwicklung der Elektromobilität leisten.
DeepDrive
@DeepDrive ist ein innovatives Unternehmen im Bereich der Elektromobilität, das eine neuartige Elektromotor-Technologie entwickelt hat, die auf einem Doppelrotor-Design basiert. Diese Architektur verspricht erhebliche Verbesserungen in Effizienz, Kostenreduktion und Leistungsdichte gegenüber herkömmlichen Antriebssystemen. Der Kern der DeepDrive-Technologie ist ein Doppelrotor-Radialflussmotor. Im Gegensatz zu traditionellen Elektromotoren, bei denen der Stator entweder einen innenliegenden oder einen außenliegenden Rotor antreibt, bewegt der Stator bei DeepDrive sowohl einen inneren als auch einen äußeren Rotor gleichzeitig. Dieses Design ermöglicht eine effizientere Nutzung des magnetischen Flusses und führt zu einer höheren Leistungsdichte. Ein weiteres Merkmal ist das revolutionäre Wicklungskonzept mit verteilten Stabwicklungen, das einen Schlitzfüllfaktor von über 80 % erreicht und die Herstellung vereinfacht. Zudem integriert DeepDrive einen ultraeffizienten SiC-Wechselrichter, der mit innovativer Topologie und SiC-MOSFETs optimiert ist, um Verluste zu reduzieren.
Technologie und Aufbau
Die Vorteile dieser Technologie liegen vor allem in der Materialeinsparung, da der Motor 50 % weniger Magnetmaterial und 80 % weniger Eisen im Vergleich zu aktuellen E-Antrieben benötigt, was zu einer signifikanten Gewichts- und Kostenreduktion führt. Durch den geringeren Materialeinsatz und die effiziente Bauweise können die Produktionskosten um etwa 30 % gesenkt werden. Fahrzeuge mit DeepDrive-Technologie können eine bis zu 20 % höhere Effizienz im Fahrzyklus erreichen, was entweder die Reichweite erhöht oder die Größe der benötigten Batterie reduziert. Die Motoren sind kompakt und leicht, was zu einer besseren Raumausnutzung im Fahrzeug führt. Allerdings bringt die Technologie auch Herausforderungen mit sich. Die Doppelrotor-Architektur erfordert präzise Fertigungstechniken und kann die Produktionsprozesse komplexer gestalten. Zudem kann die Implementierung neuer Technologien in bestehende Fahrzeugplattformen Herausforderungen mit sich bringen, insbesondere in Bezug auf Designanpassungen und Kompatibilität.

Im Vergleich zu traditionellen Elektromotoren, die entweder als Innenläufer oder Außenläufer konzipiert sind, bietet das Doppelrotor-Design von DeepDrive eine effizientere Nutzung des magnetischen Flusses und eine höhere Leistungsdichte. Zudem ermöglicht die Materialeinsparung bei Magneten und Eisen eine kosteneffizientere Produktion. Im Gegensatz zu Radnabenmotoren, die direkt in den Rädern integriert sind und oft mit erhöhten ungefederten Massen kämpfen, bietet DeepDrive eine zentrale Antriebslösung, die diese Problematik umgeht.
Anwendungen und Zukunftsfähigkeit
DeepDrive arbeitet derzeit mit acht der zehn größten Automobilhersteller zusammen, wobei die Integration der Motoren in Serienfahrzeuge für das Jahr 2028 erwartet wird. Die Technologie ist sowohl für zentrale Antriebseinheiten als auch für Radnabenantriebe geeignet, was eine breite Anwendungspalette ermöglicht. Die Kombination aus hoher Effizienz, Kosteneffektivität und Materialeinsparung macht die DeepDrive-Technologie zu einer vielversprechenden Lösung für die Zukunft der Elektromobilität.
Zusammenfassend stellt die DeepDrive-Technologie einen bedeutenden Fortschritt im Bereich der Elektromotoren dar, mit dem Potenzial, die Effizienz zu steigern, Kosten zu senken und die Nachhaltigkeit in der Automobilindustrie zu fördern.
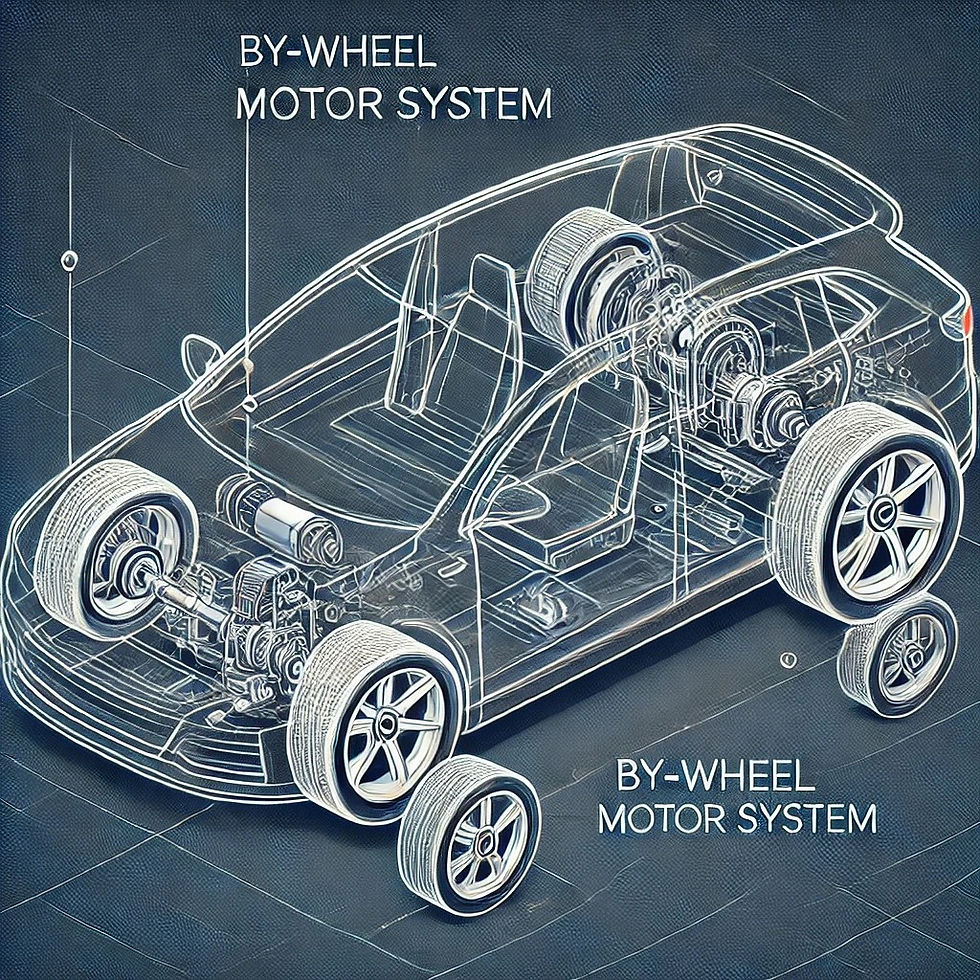
By-Wheel-Motoren – Eine Alternative zu In-Wheel-Antrieben
Ein weiterer wichtiger Ansatz, der sich zunehmend durchsetzt, sind By-Wheel-Motoren. Im Gegensatz zu herkömmlichen Radnabenmotoren, die vollständig in die Radnabe integriert sind, werden By-Wheel-Motoren in der Regel an den Rädern montiert, aber nicht direkt in die Nabe integriert. Dies bringt einige entscheidende Vorteile mit sich.
By-Wheel-Motoren bieten eine höhere Zuverlässigkeit, da sie weniger mechanischen Belastungen ausgesetzt sind als vollständig integrierte In-Wheel-Antriebe. Dadurch sind sie robuster und weniger anfällig für Probleme wie Lagerausfälle oder Verschleißerscheinungen. Ein weiterer wesentlicher Vorteil ist die bessere Wärmeableitung. Da die Motoren nicht vollständig in die Radnabe integriert sind, kann die Abwärme effizienter abgeführt werden, was die Gesamtleistung und die Lebensdauer des Motors verbessert.
Ein zusätzlicher Pluspunkt ist die Flexibilität im Fahrzeugdesign. By-Wheel-Motoren ermöglichen es den Herstellern, die Fahrzeugarchitektur besser an verschiedene Anforderungen anzupassen, da sie nicht zwingend an eine bestimmte Radgröße oder Bauweise gebunden sind. Dies eröffnet neue Möglichkeiten für optimierte Plattformen im Elektrofahrzeugbau. Zudem können diese Motoren eine verbesserte Traktion und Beschleunigung bieten, da sie direkt an den Rädern arbeiten und so die Kraftübertragung effizienter gestalten.
By-Wheel-Motoren kommen zunehmend bei hochpreisigen chinesischen Elektrofahrzeugen zum Einsatz, da sie eine optimale Balance zwischen Leistung, Effizienz und Integration bieten. Da immer mehr Kunden nach zuverlässigen und leistungsstarken Lösungen suchen, ist das Interesse an By-Wheel-Motoren in den letzten Jahren gestiegen. Viele hochpreisige chinesische Automarken wie Yangwang, Denza, Zeekr, Lynk&Co und Xiaomi haben begonnen, diese Technologie zu nutzen, was zu einem signifikanten Wachstum in diesem Segment geführt hat.

Unterschiede zwischen By-Wheel-Motoren, In-Wheel-Hubs und DeepDrive-Antrieben.
Während klassische In-Wheel-Hub-Motoren direkt in der Radnabe sitzen und das Rad unmittelbar antreiben, befinden sich By-Wheel-Motoren außerhalb der Radnabe, sind aber direkt an den Rädern befestigt. Dies reduziert die ungefederte Masse, die bei Radnabenmotoren oft als Nachteil angesehen wird. Der DeepDrive Doppelrotor-Antrieb, eine weitere innovative Entwicklung, unterscheidet sich von beiden Konzepten dadurch, dass er nicht nur eine extrem kompakte Bauweise bietet, sondern durch seine Doppelrotor-Technologie den Wirkungsgrad maximiert und die Kosten für Materialien senkt. Im Gegensatz zu By-Wheel-Motoren, die auf eine möglichst flexible Integration setzen, ist DeepDrive besonders für skalierbare Fahrzeugplattformen optimiert.

Diese unterschiedlichen Konzepte zeigen, dass sich die Elektromobilität stetig weiterentwickelt und verschiedenste Lösungen für unterschiedliche Anforderungen bereitstellt. Während klassische In-Wheel-Antriebe durch die direkte Integration ins Rad Gewicht und Platz sparen, bieten By-Wheel-Motoren eine bessere Wärmeableitung und Robustheit. DeepDrive wiederum optimiert den Effizienz- und Materialeinsatz und könnte in der Zukunft eine Schlüsselrolle im Elektrofahrzeugbau spielen.



Kommentare